キーワードによるナレッジベースの検索
構造化プロセススキャン
スタートガイド
この記事では、構造化プロセススキャンワークフローに関する一般的な情報について説明します。 プロセススキャン はEdgeWiseプロジェクトの最初のステップであり、XNUMXつの異なるワークフローで構成されています。 非構造化、およびポイントデータベースプロセススキャン。
構造化されたワークフローにより、配管、壁、および地盤モデルを自動的に抽出できます。 このワークフローを使用するには、スキャン ファイルを登録し、構造化/非統合 (行と列の情報を含む) にする必要があります。
ファイルの種類
EdgeWiseに取り込むことができる特定の構造化ファイルタイプを以下に示します。
- トリンブル .TZF
- ファロ .FLS
- ライカ.PTG
- Z + F .ZFS、.ZFPRJ
- ドット積.DP
- ゲクセル.RGP
- 要約.RCP
- .PTX
- .E57(構造化)
プロセススキャン
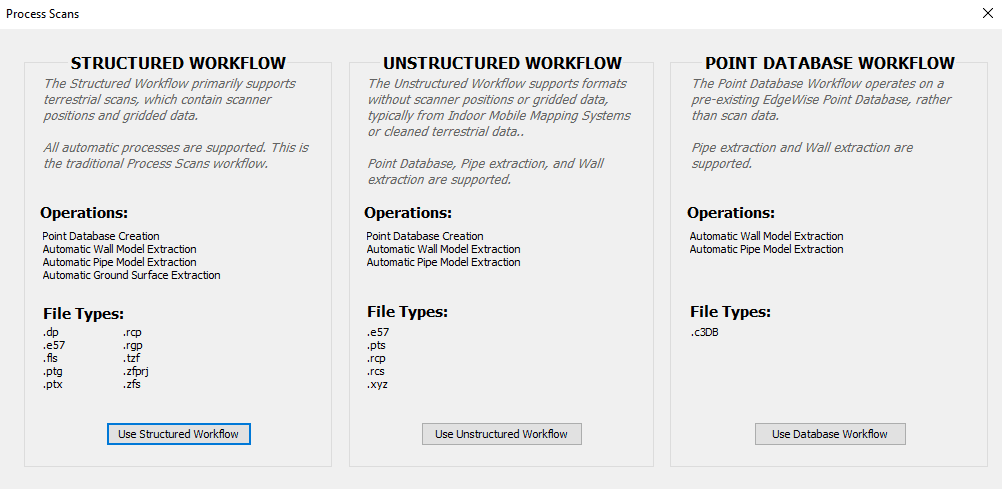
スキャンを処理するには、まず プロセススキャン ファイルタブの下にあるボタン。 [スキャンの処理] ボタンをクリックすると、 プロセススキャン ダイアログボックスが表示されます。 あなたが持っている場合 構造化データには、Live モジュールで提供された 構造化されました ワークフロー. まず、 構造化ワークフローを使用する
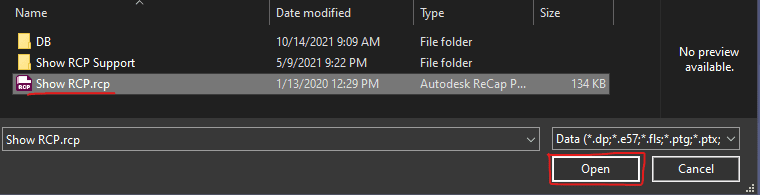
あなたが 構造化ワークフローを使用する ボタン、 ファイルエクスプローラ 現れる。 スキャン ファイルの場所に移動し、すべてのスキャン ファイルを選択して、 Open
クリックした後 Open ファイル エクスプローラー内のボタン、 プロセススキャンオプション ダイアログボックスが表示されます。
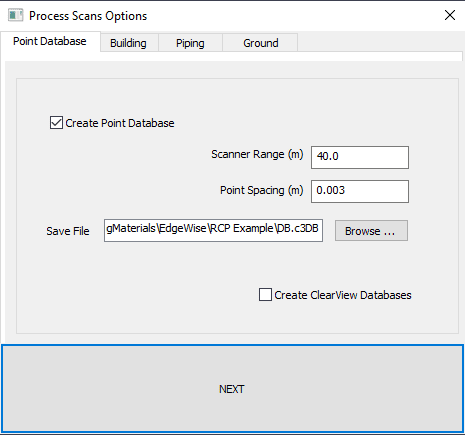
プロセススキャンオプション ダイアログ ボックスでは、各モジュールの処理設定を変更するだけでなく、自動的に処理されるモジュールを選択できます。 以下のさまざまなセクションでは、各モジュールの設定について詳しく説明します。
ポイントデータベース
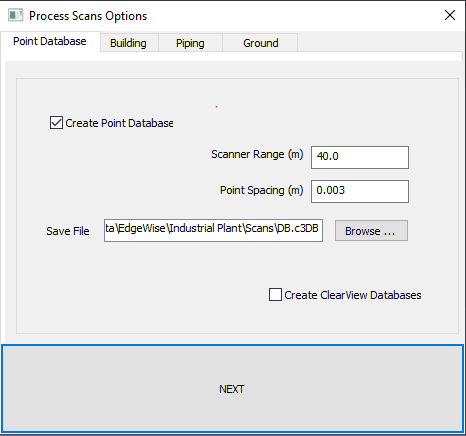
EdgeWiseがポイントクラウドを表示する前に、まずスキャンを.c3dbポイントデータベースモデルに変換する必要があります。
スキャナー範囲 – EdgeWise は、このパラメーターを使用して、データベースに含めることができるスキャナー位置からの距離を決定します。
ポイント間隔 –データベースに保存されているポイント間の最小間隔。 数値が大きいほど、点群はまばらになります。 密度の高い点群は少し見栄えがよいかもしれませんが、作成するのにかなり多くのディスクスペースと時間がかかります。
ClearViewデータベースを作成する –ClearView設定を使用してプロジェクトを表示するために使用されるポイントデータベースを作成するオプションです。を参照してください。 ClearViewモード. 注:この追加のデータベースを作成すると、特定のスキャンの処理時間がXNUMX倍またはXNUMX倍以上になる可能性があります。.
建物
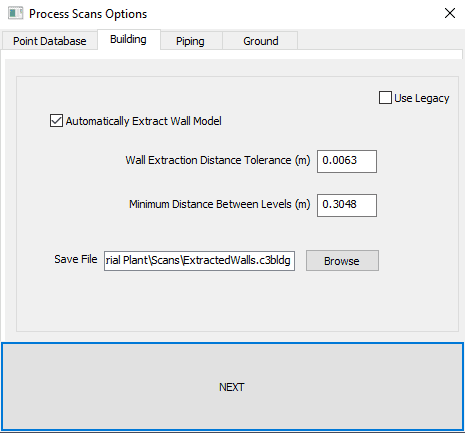
EdgeWiseは、この自動化されたプロセスで壁とレベルを自動的に抽出します。 さらに、構造化、非構造化、およびデータベースワークフローのこのプロセスのサポートが利用可能であり、利用可能なすべてのファイルタイプをサポートします。 チェック 壁モデルを自動的に抽出する EdgeWiseは、プロセススキャン中に壁モデルを自動的に作成します。 壁を抽出したくない場合は、チェックボックスをオフにします。
壁の抽出距離の許容範囲 – EdgeWiseが壁を自動的に検出しようとしている場合、この許容値は、抽出プロセスに使用されている間、ポイントが壁の表面から離れることができる最大距離を制御します。 アルゴリズムは、壁の抽出プロセスで、壁の表面からこの距離の外側にあるポイントを使用しません。
レベル間の最小距離 –自動レベル検出中、このパラメーターは、すでに検出されたレベルの指定された距離内でのレベルの作成を制限し、重複または不要なレベルの数を本質的に減らします。
レガシーを使用する: 構造化ワークフローでのみ使用可能です。このオプションをオンにすると、レガシービルディング抽出アルゴリズムに切り替わります。
レガシービルディング
スキャンデータに存在する平坦な、または平面の表面は、この自動化されたプロセスで検出されます。 後でこれらの平面モデルを使用して、レベル、壁、ウィンドウを作成できます。これらはすべて.c3bldgファイルに保存されます。
EdgeWise 5.4 の時点で、このアルゴリズムは新しい壁抽出アルゴリズムに効果的に置き換えられました。 ただし、構造化データを使用している場合でも、 レガシーを使用 Process Scans の Building タブのチェックボックス。
このアルゴリズムによって生成されたモデルは、レガシーワークフローに従います。
スキャンが屋内と屋外の両方で行われた場合、次のワークフローでより良い結果が得られる可能性がありますが、時間がかかる可能性があります。
- まず、すべてのスキャンでポイント データベースのみを処理します。 一度に EdgeWise に存在できるポイント データベースは XNUMX つだけです。 さらに、最初の抽出後にデータベースにスキャンを追加することはできません。 このため、関連するすべてのスキャンを処理して、ワークフローの最初に XNUMX つのデータベースを作成するようにしてください。
- 次に、スキャンを内部と外部の XNUMX つのグループに分割します。
- 次に、内部スキャンを これらのスキャンは屋外で行われました チェックボックスをオフにし、 平面を自動的にマージする チェックボックスをオフにします。
- 次に、外部スキャンを これらのスキャンは屋外で行われました チェックボックスと 平面を自動的にマージする チェックボックスをオフにします。
- 最後に、 パーツのマージ ボタンをクリックして、両方のプロセスで作成されたすべての .c3planes ファイルをマージします。
このワークフローを高速化するには、EdgeWiseのXNUMXつのインスタンスを開き、XNUMXつのプロセススキャン(Just Database、Just Outdoor、Just Indoor)を連続して実行するのではなく、同時に実行することを検討してください。
ネットワークライセンスを使用するときは、最大インスタンス数(通常は5)を超えないように注意してください。
レガシー構築プロセスオプション
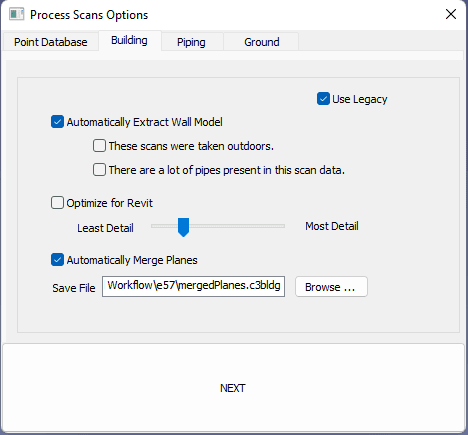
これらのスキャンは屋外で行われました:地表面の平面は抽出されません。 スキャン データにかなりの量の地形がある場合、このオプションにより処理パフォーマンスが大幅に向上します。 内部スキャンの床にある平面も除外されることに注意してください。
このスキャンデータには多くのパイプが存在します:アルゴリズムは、円柱状のオブジェクト上の平面を抽出しようとはしません。 円柱状のオブジェクトはEdgeWiseパイプモデルでより適切に表現されるため、パイプを抽出するときにこの設定を使用します(EdgeWise PlantまたはMEPモジュール、あるいはその両方がアクティブな場合にのみ使用可能)。 このオプションをチェックすると、通常、平面モデルをナビゲートするのがより簡単で簡単になります。
Revit用に最適化:平面モデルの詳細レベルは、最終的に壁と窓をRevitにエクスポートするワークフローに最適な設定に設定されます。 これは、詳細レベルを3に設定するのと同じです。
詳細度:自動抽出中に作成された平面データで表される詳細レベル(1から10)。 スライダーを左にスライドさせると(1)、より単純な平面モデルが作成されます。 スライダーを右端まで動かすと(10)、より詳細なモデルが作成されます。 Revitの壁モデルを作成する場合は、一般に詳細レベルを低くする方が望ましいですが、3DS Maxなどのアプリケーションで、抽出された平面を参照として使用するソリッドモデリングを含むワークフローでは、詳細レベルを高くすることが望ましい場合があります。
平面を自動的にマージする:各スキャンの平面データ(.c3planes)は、単一の建物モデル(.c3bldg)に自動的にマージされます。 チェックを外すと、パーツのマージを使用して.c3planesファイルをマージする必要があります。 EdgeWiseにロードできるのは.c3bldgファイルのみであるため、このオプションをオンのままにしておくことをお勧めします。
注:プレーンのマージは非常に時間のかかるプロセスになる可能性があるため、一度に50スキャンのデータのみをマージすることを強くお勧めします。
パイピング
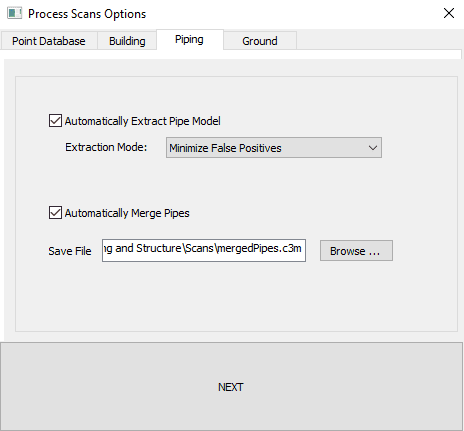
パイプモデルを自動的に抽出します パイプモデルを自動的に抽出する ボックスが選択されました。
抽出モード –抽出中にEdgeWiseが使用する配管自動化アルゴリズムを選択します。 誤検知を最小限に抑える より多くの非円筒形アイテムおよびその他の誤検知を除外しようとします。 抽出数を最大化する 誤検知の数が少なくなるため、パイプの抽出が増えますが、誤検知の抽出が増える可能性があります。 スキャナーのノイズレベルが低く、プロジェクトのスキャンカバレッジが良好である場合は、次を選択する必要があります。 誤検知を最小限に抑える。 スキャナーのノイズレベルが高い場合、またはプロジェクトのスキャンカバレッジが不十分な場合は、代わりに選択する必要があります 抽出数を最大化する.
パイプを自動的にマージする – .c3pipesファイルを自動的にマージし、モデルをシーンにロードします。 このオプションを選択し、ポイントデータベースを作成していない場合は、ポイントデータベースファイルの入力を求めるプロンプトが表示されます。 このポイントデータベースファイルには、現在のスキャンの少なくともすべてが含まれている必要があります プロセススキャン 実行されます。 Wこのチェックボックスをオンのままにしておくことをお勧めします。 c3pipesファイル, 単独では、EdgeWiseにロードすることはできません。 それらのマージされた対応物であるc3mファイルは可能です。 アルゴリズムにこれを前もって行わせるのが最善です。
陸上
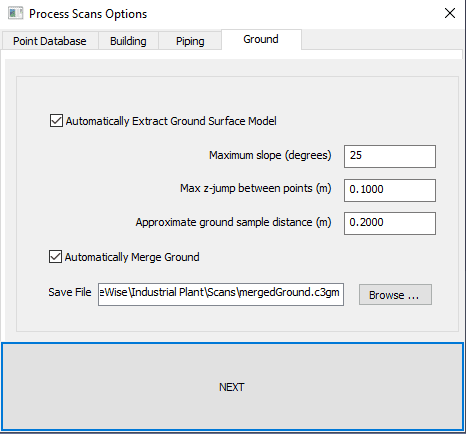
EdgeWiseは、スキャン内の最も低いポイントから開始し、緩やかに傾斜した表面を上向き(および下向き)にたどって、近くの地面ポイントまで成長する自動地面探索アルゴリズムを提供します。 GroundSurfaceモジュール内でXNUMXつの異なるパラメータを調整できます。
最大勾配 –成長するアルゴリズムが、地面のポイントを探しながら登ることができるようにするために使用する最も急な角度。
ポイント間の最大Zジャンプ –新しい地上点を見つけるために、プログラムが既存の地上点より上に登ることができるz方向の最大距離。
おおよその地上サンプル距離 –三角形分割されたサーフェス(TIN)を構築するために使用されるおおよその地上サンプリング距離を決定する設定。