キーワードによるナレッジベースの検索
ユーザーがフィールド内の場所にタグを付けるには、Verity PhotoiOSアプリで読み取ることができる2D「.MAP」ファイルを生成する必要があります。 「.MAP」ファイル形式は、3Dフロアプランマップを表すために使用される独自のClearEdge2D形式です。
Navisworks®では、モデルに2Dマップレイヤーがあることを確認してください。 位置情報はこのレイヤーから取得されるため、このマップはモデルに正しく登録/配置する必要があります。
Autodesk®Revit®、3DAutoCAD®、またはその他の3Dモデリングプログラムのモデルを使用している場合。 2Dビュー(Revit®のPlan / RCP、AutoCAD®のSheetなど)に移動し、そのビューから2D DWG / DXFをエクスポートして、別のファイルとしてNavisworks®にロードすることをお勧めします。 これにより、マップのエクスポートを目的として、部屋名やフィールドチームへの指示などの注釈を2Dファイルに配置できます。 Navisworks®にロードされたら、その特定のファイル/レイヤーを選択し、VerityPhotoプラグインを使用してマップファイルを生成します。

マップレイヤーを選択…

そして、VerityPhotoツールバーで「2Dプラン>エクスポート」を選択します

MAPエクスポートの出力ファイル名を選択します。 ここでは、ファイルD:\ MyMapExport.mapにエクスポートすることを選択しました
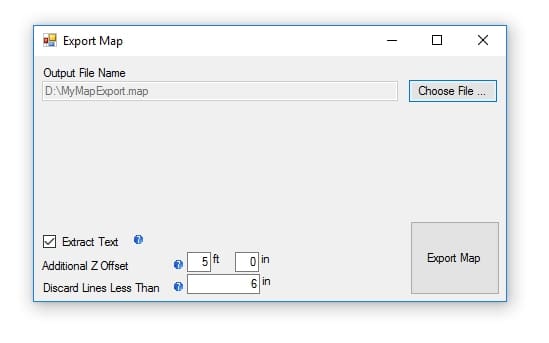
[マップのエクスポート]ウィンドウの左下にあるオプションは次のとおりです。
テキストの抽出: これがチェックされている場合、Verity Photoは光学式文字認識(OCR)を使用して、Navisworks®モデルのテキストラベルを認識し、最終的なMAPファイルに保存します。 このようにして、ユーザーは自分の場所にタグを付けるときに地図上にテキストラベルを表示できるようになります。
追加のZオフセット: フロアプランマップレイヤーは、Navisworks®モデルの「地面」レベルに配置されることがよくあります。 オフセットが指定されていない場合、ユーザーが自分の場所にタグを付けると、Navisworksモデルのマップレイヤーのレベルで正確にタグが付けられます。つまり、レイヤーがフロアレベルの場合、位置はフロアでタグ付けされます。 ユーザーが入力するので、Zオフセットを入力する方が便利な場合があります 実際に 彼らが写真を撮るときは、地面から約5フィート離れている(平均的なサイズの人間の場合)。
以下の行を破棄します。 多くの場合、Navisworks®のフロアプランマップには、ユーザーが自分の場所にタグを付ける必要のない非常に細かい詳細が含まれている場合があります。 このオプションは、指定された長さより短いモデル内の行を「スキップ」します。これにより、最終的にエクスポートされるMAPファイルのサイズを縮小できます。 マップ内のすべての行を完全に保持するために、これをゼロに設定できますが、これはお勧めしません。
「マップのエクスポート」をクリックして、エクスポートプロセスを開始します…
マップのエクスポートが完了すると、VerityPhotoはWindowsエクスプローラーでエクスポートを見つけるかどうかを尋ねてきます。